eulerRPY
-
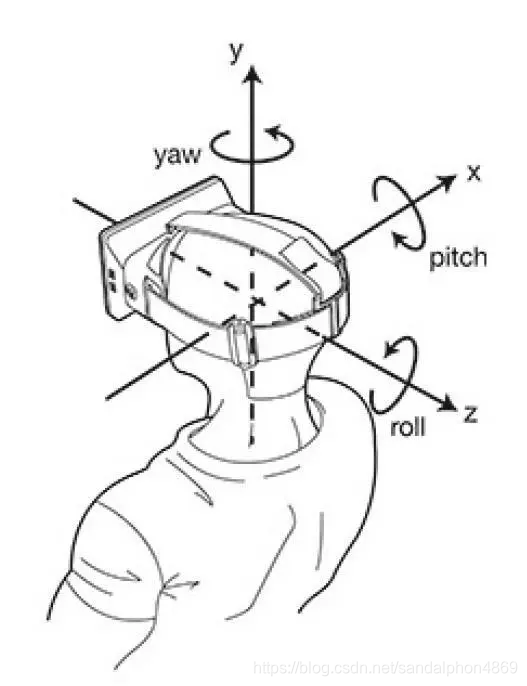
Roll, 横滚,α
-
Pitch, 俯仰,β
-
Yaw, 航向,ϒ
eulerRPY旋转序列
欧拉角旋转序列(Euler Angle Rotational Sequence)一共有12种顺规,6种绕三条轴的旋转(也叫Tait-Bryan Angle):
- XYZ,XZY,YXZ,YZX,ZXY,ZYX
另外6种只绕两条轴的旋转(也叫Proper Euler Angle)
- XYX,YXY,XZX,ZXZ,YZY,ZYZ
例如DirectXMath库采用的是ZXY顺规,分别对应着Z-Roll,X-Pitch,Y-Yaw
常见eulerRPY序列
- ros,XYZ
- isaac sim, ZYX
角度的正负
站在轴的箭头位置,即让轴的箭头指向自己,逆时针为正,顺时针为负数